
 当前位置:
当前位置: 
 顾问全程陪同指导让您无忧
顾问全程陪同指导让您无忧 免费看墓专车上门接送
免费看墓专车上门接送 购墓优惠折扣多还有赠品
购墓优惠折扣多还有赠品 殡葬一条龙让您省心省事
殡葬一条龙让您省心省事深度学习在路径规划上有哪些应用?
2024-05-13 09:59 作者:佚名
本题已收录至知乎圆桌:人工智能 · 机器感知,更多「人工智能」相关话题欢迎关注讨论
分享一篇论文:Value Iteration Networks([1602.02867]Value Iteration Networks)。这篇文章发在了16年nips上。大致思路就是把2d navigation的问题转化成一个MDP问题来求解。我觉得比较新颖的地方是巧妙的运用CNN框架里面的max pooling来实现强化学习里面value iteration算法,从而用训练CNN的方法来实现强化学习的目的。
不过个人感觉强化学习用在路径规划里面都有种强行套模型的感觉,没看出比传统的路径规划的优势体现在何处。这一点欢迎大家来讨论
终于来了个自己研究方向的题目~
PS:路径规划(Path Planning)与运动规划(Motion Planning)在数学上是同一个问题,所以我在文中就直接混用了。
首先,我们要先明确路径规划/运动规划的定义:

简单地说,就是给定环境、机器人模型,指定规划目标(如无碰撞到达目的点),自动计算出机器人的运动路径(可以是一序列离散状态,也可以是运动策略)。
当然,传统的运动规划方法可以看我之前发过的两篇文章(运动规划 | 简介篇,运动规划 | 视频篇),这里就不展开了。所以,如 @Pickles Husky 所说,如果想将机器学习直接塞到现有的运动规划,似乎并不是一个好方法。于是,只能想办法发明新的运动规划框架了。
第一种,当然就是监督学习(Supervised Learning )的形式了。
这个其实很简单,Andrew Ng 的机器学习公开课(https://www.youtube.com/watch?v=_2zt4yVCkGk )里就提到了这样的一个例子

如上图所示,无人车通过输入前方图像,在人类驾驶员的标记动作下训练一段时间后,即可实现汽车的自主驾驶。
当然,上面这个例子的还是很简单的,所能应对的应用场景也极其有限;深度学习出来后,当然也有人做了类似的工作(前面的答主也有提到过这篇文章):
Pfeiffer, Mark, et al. "From Perception to Decision: A Data-driven Approach to End-to-end Motion Planning for Autonomous Ground Robots." arXiv preprint arXiv:1609.07910 (2016).
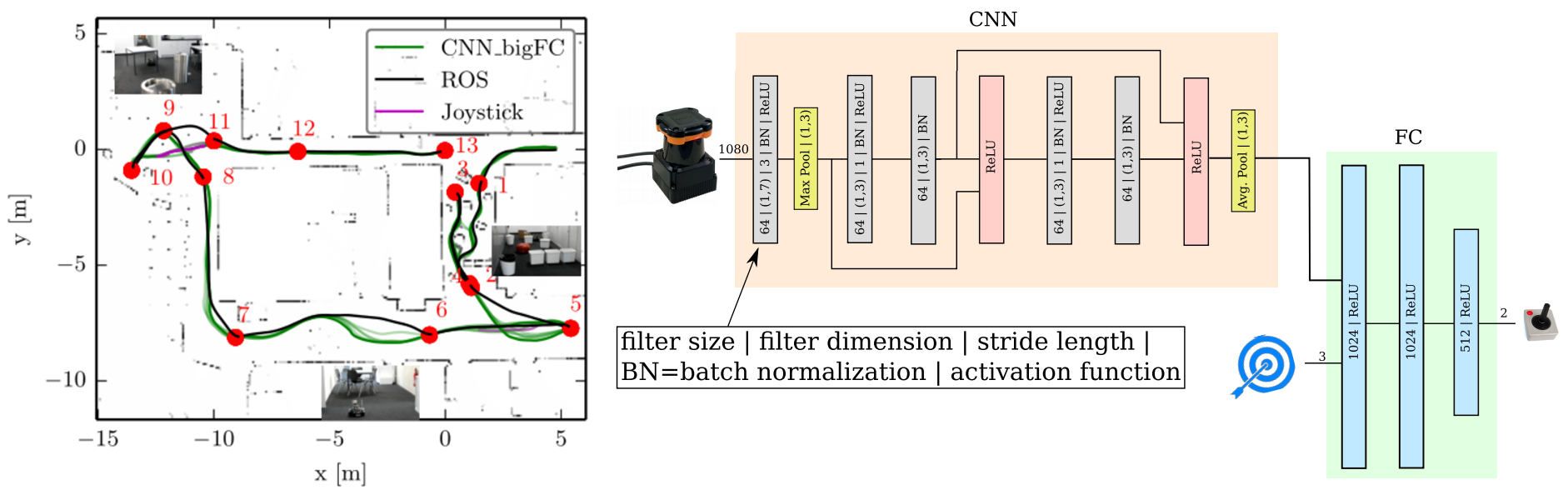
这篇文章的意思大概就是利用 CNN 解析激光信息,然后利用 A* 算法作为标记信息,进行监督学习。所以,这篇论文的工作其实跟前面那个自动驾驶的例子没什么太大区别。
目前看来,用监督学习的框架做运动规划,在环境变化不大的情况下,有可能实现;但是这种方法强烈依赖于标记算法(平面还好,有A*;高维机械臂的话,没什么好的『最优』算法),而且对环境变化的泛化能力比较弱。
第二种框架就是强化学习(Reinforcement Learning)了。这里我就先不详细展开强化学习的内容了,有兴趣的可以先去刷一遍 Sutton 的书:
Sutton, Richard S., and Andrew G. Barto. Reinforcement learning: An introduction. Vol. 1. No. 1. Cambridge: MIT press, 1998.
简而言之,路径规划就是一个标准的 MDP 问题,强化学习可以通过值迭代(value iteration)等方法建立一个表格,用以存储状态 s (如机器人当前位置)到动作 a (控制指令)的映射。这样,把机器人放在地图中任何一个位置,它都能迅速地确定自己下一时刻的动作,而这个动作将引导机器人运动到目标点。
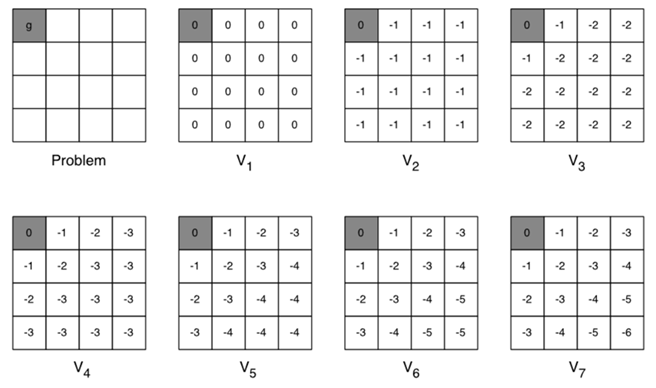
当然,如果目标点不同、障碍物位置不同,我只需生成多张表格即可。但是,这样就是造成表格太大,占用内存太多的问题。
后来,深度学习出现了,它有可能地完成两件事:1)从传感器观测数据 o 中提取出状态 s;2)拟合出状态 s 与动作 a 的映射关系(就是前面说的表格)。
大名鼎鼎的 DQN 就可以简单地认为在做这两件事(当然,它就是 End-to-End 的结构,实际上并不能简单地分为这样的两个步骤):
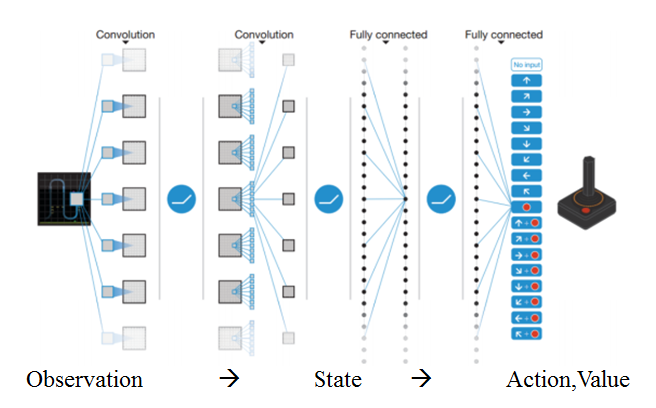
Mnih, Volodymyr, et al. "Human-level control through deep reinforcement learning." Nature 518.7540 (2015): 529-533.
深度强化学习的好处是我们不依赖于人工标记的轨迹,只需要指定规划目标(无碰撞、到达目的地、路径最短等),让机器人不断尝试、迭代更新网络即可。
当然,这一块用在路径规划的工作也已经有了:
Tai, Lei, and Ming Liu. "Towards cognitive exploration through deep reinforcement learning for mobile robots." arXiv preprint arXiv:1610.01733(2016). Tai, Lei, Giuseppe Paolo, and Ming Liu. "Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation." arXiv preprint arXiv:1703.00420 (2017).
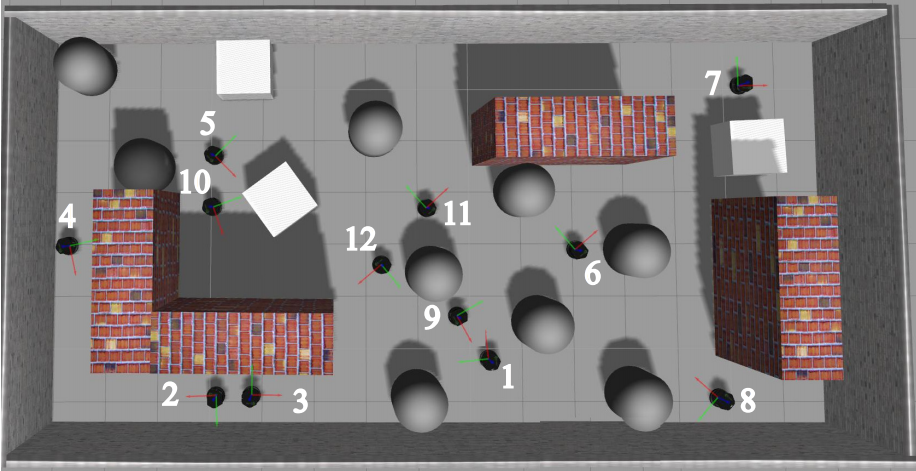
这篇文章就是让移动机器人在仿真环境中不断尝试学习、训练 DQN,最终得到一个较好的路径规划结果。
毕竟,现在 Planning-from-scratch 的规划方法总是给我一种『人类不是这样规划的呀』的感觉;深度强化学习又跟人类的技能学习方法很相似;如果成功,规划时间很短(一次前向传播的时间)。所以,我感觉,深度强化学习有希望成为彻底解决机器人运动规划问题的途径,未来几年应该也会涌现出一大堆 paper。
PS:从个人角度而言,如果还只是刚开始做路径规划的小伙伴,极度不建议直接上深度学习;我还是比较建议先至少把传统的规划算法体系都搞清楚,之后,如有可能,再去尝试深度学习。理由的话,以后有机会再聊吧。
暗中观察。
先占个坑,慢慢补充。
深度学习在很多领域都有非常广泛的应用,但是也存在着局限性。可能从有什么应用的问题及挑战开始说起,再到解决方案的一些思路来展开比较有意思一些。
私以为深度学习在路径规划上的难点主要是深度学习这一套方法的“不可解释”性或者说无法数学上严格证明某种特性而带来的问题。路径规划一般是用在机器人的执行层面上的,对于算法结果输出的稳定性和鲁棒性有很高的要求,最好能够从数学层面上严格证明其输出结果的特性,进而证明如在某一类特定场景或者应用中可预测的稳定输出,保证不会出现意外情况。但是由于深度学习用了多层复杂的神经网络,所以它本身的数学表达形式就非常复杂,即使给定了训练后的一套参数也无法简单地通过数学方法证明其输出结果的特性和稳定性,更不要说怎么证明其训练过程和不同网络参数下的特性了。直接应用到路径规划上,很可能会产生灾难性的后果。
(未完待续)
深度学习在路径规划领域的应用有很多。例如,可以用深度学习模型来预测道路交通流量,优化路径规划;也可以用深度学习模型来识别道路地形,从而规划出最优路径;还可以用深度学习模型来分析道路安全性,提供安全的路径规划建议。
 真实优惠
真实优惠 信息全面
信息全面 专业服务
专业服务 万千口碑
万千口碑 诚信经营
诚信经营 广东墓地网手机站
广东墓地网手机站 天猫官方旗舰店
天猫官方旗舰店 020-88888888
020-88888888
