
 当前位置:
当前位置: 
 顾问全程陪同指导让您无忧
顾问全程陪同指导让您无忧 免费看墓专车上门接送
免费看墓专车上门接送 购墓优惠折扣多还有赠品
购墓优惠折扣多还有赠品 殡葬一条龙让您省心省事
殡葬一条龙让您省心省事[PyTorch 学习笔记]4.3 优化器
2024-06-18 21:44 作者:佚名
本章代码:
- https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson4/optimizer_methods.py
- https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson4/momentum.py
这篇文章主要介绍了 PyTorch 中的优化器,包括 3 个部分:优化器的概念、optimizer 的属性、optimizer 的方法。
PyTorch 中的优化器是用于管理并更新模型中可学习参数的值,使得模型输出更加接近真实标签。
PyTorch 中提供了 Optimizer 类,定义如下:
class Optimizer(object):
def __init__(self, params, defaults):
self.defaults=defaults
self.state=defaultdict(dict)
self.param_groups=[]
主要有 3 个属性
- defaults:优化器的超参数,如 weight_decay,momentum
- state:参数的缓存,如 momentum 中需要用到前几次的梯度,就缓存在这个变量中
- param_groups:管理的参数组,是一个 list,其中每个元素是字典,包括 momentum、lr、weight_decay、params 等。
- _step_count:记录更新 次数,在学习率调整中使用
- zero_grad():清空所管理参数的梯度。由于 PyTorch 的特性是张量的梯度不自动清零,因此每次反向传播之后都需要清空梯度。代码如下:
def zero_grad(self):
r"""Clears the gradients of all optimized :class:`torch.Tensor` s."""
for group in self.param_groups:
for p in group['params']:
if p.grad is not None:
p.grad.detach_()
p.grad.zero_()
- step():执行一步梯度更新
- add_param_group():添加参数组,主要代码如下:
def add_param_group(self, param_group):
params=param_group['params']
if isinstance(params, torch.Tensor):
param_group['params']=[params]
...
self.param_groups.append(param_group)
- state_dict():获取优化器当前状态信息字典
- load_state_dict():加载状态信息字典,包括 state 、momentum_buffer 和 param_groups。主要用于模型的断点续训练。我们可以在每隔 50 个 epoch 就保存模型的 state_dict 到硬盘,在意外终止训练时,可以继续加载上次保存的状态,继续训练。代码如下:
def state_dict(self):
r"""Returns the state of the optimizer as a :class:`dict`.
...
return{
'state': packed_state,
'param_groups': param_groups,
}
下面是代码示例:
张量 weight 的形状为 ,并设置梯度为 1,把 weight 传进优化器,学习率设置为 1,执行
optimizer.step()更新梯度,也就是所有的张量都减去 1。
weight=torch.randn((2, 2), requires_grad=True)
weight.grad=torch.ones((2, 2))
optimizer=optim.SGD([weight], lr=1)
print("weight before step:{}".format(weight.data))
optimizer.step() # 修改lr=1, 0.1观察结果
print("weight after step:{}".format(weight.data))
输出为:
weight before step:tensor([[0.6614, 0.2669],
[0.0617, 0.6213]])
weight after step:tensor([[-0.3386, -0.7331],
[-0.9383, -0.3787]])
代码如下:
print("weight before step:{}".format(weight.data))
optimizer.step() # 修改lr=1 0.1观察结果
print("weight after step:{}".format(weight.data))
print("weight in optimizer:{}\
weight in weight:{}\
".format(id(optimizer.param_groups[0]['params'][0]), id(weight)))
print("weight.grad is{}\
".format(weight.grad))
optimizer.zero_grad()
print("after optimizer.zero_grad(), weight.grad is\
{}".format(weight.grad))
输出为:
weight before step:tensor([[0.6614, 0.2669],
[0.0617, 0.6213]])
weight after step:tensor([[-0.3386, -0.7331],
[-0.9383, -0.3787]])
weight in optimizer:1932450477472
weight in weight:1932450477472
weight.grad is tensor([[1., 1.],
[1., 1.]])
after optimizer.zero_grad(), weight.grad is
tensor([[0., 0.],
[0., 0.]])
可以看到优化器的 param_groups 中存储的参数和 weight 的内存地址是一样的,所以优化器中保存的是参数的地址,而不是把参数复制到优化器中。
向优化器中添加一组参数,代码如下:
print("optimizer.param_groups is\
{}".format(optimizer.param_groups))
w2=torch.randn((3, 3), requires_grad=True)
optimizer.add_param_group({"params": w2, 'lr': 0.0001})
print("optimizer.param_groups is\
{}".format(optimizer.param_groups))
输出如下:
optimizer.param_groups is
[{'params':[tensor([[0.6614, 0.2669],
[0.0617, 0.6213]], requires_grad=True)], 'lr': 1, 'momentum': 0, 'dampening': 0, 'weight_decay': 0, 'nesterov': False}]
optimizer.param_groups is
[{'params':[tensor([[0.6614, 0.2669],
[0.0617, 0.6213]], requires_grad=True)], 'lr': 1, 'momentum': 0, 'dampening': 0, 'weight_decay': 0, 'nesterov': False},{'params':[tensor([[-0.4519, -0.1661, -1.5228],
[ 0.3817, -1.0276, -0.5631],
[-0.8923, -0.0583, -0.1955]], requires_grad=True)], 'lr': 0.0001, 'momentum': 0, 'dampening': 0, 'weight_decay': 0, 'nesterov': False}]
首先进行 10 次反向传播更新,然后对比 state_dict 的变化。可以使用torch.save()把 state_dict 保存到 pkl 文件中。
optimizer=optim.SGD([weight], lr=0.1, momentum=0.9)
opt_state_dict=optimizer.state_dict()
print("state_dict before step:\
", opt_state_dict)
for i in range(10):
optimizer.step()
print("state_dict after step:\
", optimizer.state_dict())
torch.save(optimizer.state_dict(), os.path.join(BASE_DIR, "optimizer_state_dict.pkl"))
输出为:
state_dict before step:
{'state':{}, 'param_groups':[{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params':[1976501036448]}]}
state_dict after step:
{'state':{1976501036448:{'momentum_buffer': tensor([[6.5132, 6.5132],
[6.5132, 6.5132]])}}, 'param_groups':[{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params':[1976501036448]}]}
经过反向传播后,state_dict 中的字典保存了1976501036448作为 key,这个 key 就是参数的内存地址。
上面保存了 state_dict 之后,可以先使用torch.load()把加载到内存中,然后再使用load_state_dict()加载到模型中,继续训练。代码如下:
optimizer=optim.SGD([weight], lr=0.1, momentum=0.9)
state_dict=torch.load(os.path.join(BASE_DIR, "optimizer_state_dict.pkl"))
print("state_dict before load state:\
", optimizer.state_dict())
optimizer.load_state_dict(state_dict)
print("state_dict after load state:\
", optimizer.state_dict())
输出如下:
state_dict before load state:
{'state':{}, 'param_groups':[{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params':[2075286132128]}]}
state_dict after load state:
{'state':{2075286132128:{'momentum_buffer': tensor([[6.5132, 6.5132],
[6.5132, 6.5132]])}}, 'param_groups':[{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params':[2075286132128]}]}
学习率是影响损失函数收敛的重要因素,控制了梯度下降更新的步伐。下面构造一个损失函数 ,
的初始值为 2,学习率设置为 1。
iter_rec, loss_rec, x_rec=list(), list(), list()
lr=0.01 # /1. /.5 /.2 /.1 /.125
max_iteration=20 # /1. 4 /.5 4 /.2 20 200
for i in range(max_iteration):
y=func(x)
y.backward()
print("Iter:{}, X:{:8}, X.grad:{:8}, loss:{:10}".format(
i, x.detach().numpy()[0], x.grad.detach().numpy()[0], y.item()))
x_rec.append(x.item())
x.data.sub_(lr * x.grad) # x -=x.grad 数学表达式意义: x=x - x.grad # 0.5 0.2 0.1 0.125
x.grad.zero_()
iter_rec.append(i)
loss_rec.append(y)
plt.subplot(121).plot(iter_rec, loss_rec, '-ro')
plt.xlabel("Iteration")
plt.ylabel("Loss value")
x_t=torch.linspace(-3, 3, 100)
y=func(x_t)
plt.subplot(122).plot(x_t.numpy(), y.numpy(), label="y=4*x^2")
plt.grid()
y_rec=[func(torch.tensor(i)).item() for i in x_rec]
plt.subplot(122).plot(x_rec, y_rec, '-ro')
plt.legend()
plt.show()
结果如下:
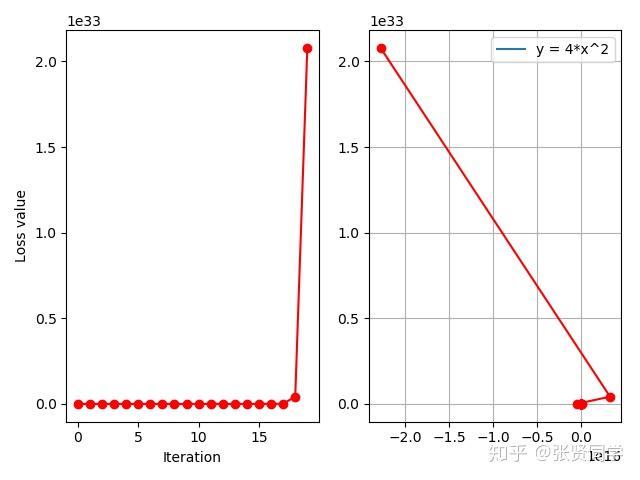
损失函数没有减少,而是增大,这时因为学习率太大,无法收敛,把学习率设置为 0.01 后,结果如下;
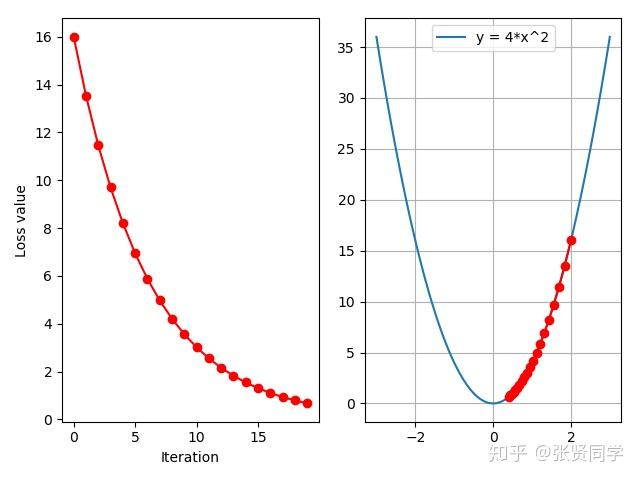
从上面可以看出,适当的学习率可以加快模型的收敛。
下面的代码是试验 10 个不同的学习率 ,[0.01, 0.5]之间线性选择 10 个学习率,并比较损失函数的收敛情况
iteration=100
num_lr=10
lr_min, lr_max=0.01, 0.2 # .5 .3 .2
lr_list=np.linspace(lr_min, lr_max, num=num_lr).tolist()
loss_rec=[[]for l in range(len(lr_list))]
iter_rec=list()
for i, lr in enumerate(lr_list):
x=torch.tensor([2.], requires_grad=True)
for iter in range(iteration):
y=func(x)
y.backward()
x.data.sub_(lr * x.grad) # x.data -=x.grad
x.grad.zero_()
loss_rec[i].append(y.item())
for i, loss_r in enumerate(loss_rec):
plt.plot(range(len(loss_r)), loss_r, label="LR:{}".format(lr_list[i]))
plt.legend()
plt.xlabel('Iterations')
plt.ylabel('Loss value')
plt.show()
结果如下:
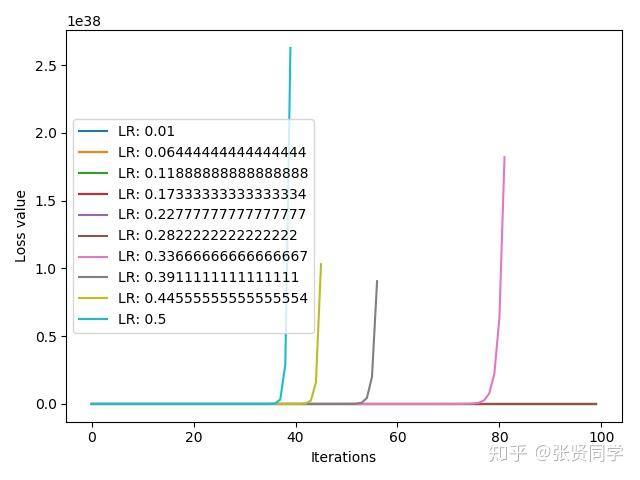
上面的结果表示在学习率较大时,损失函数越来越大,模型不能收敛。把学习率区间改为[0.01, 0.2]之后,结果如下:
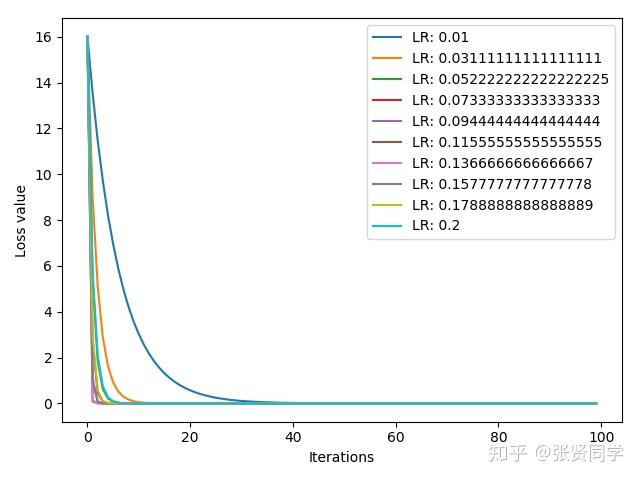
这个损失函数在学习率为 0.125 时最快收敛,学习率为 0.01 收敛最慢。但是不同模型的最佳学习率不一样,无法事先知道,一般把学习率设置为比较小的数就可以了。
momentum 动量的更新方法,不仅考虑当前的梯度,还会结合前面的梯度。
momentum 来源于指数加权平均:,其中
是上一个时刻的指数加权平均,
表示当前时刻的值,
是系数,一般小于 1。指数加权平均常用于时间序列求平均值。假设现在求得是 100 个时刻的指数加权平均,那么
从上式可以看到,由于 小于 1,越前面时刻的
,
的次方就越大,系数就越小。
可以理解为记忆周期,
越小,记忆周期越短,
越大,记忆周期越长。通常
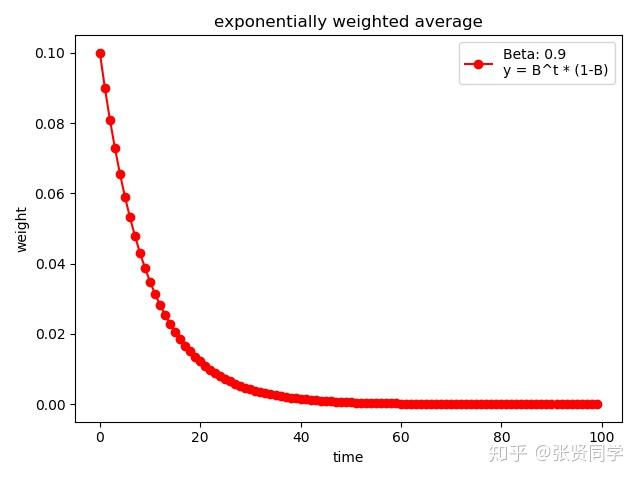
设置为 0.9,那么
,表示更关注最近 10 天的数据。
下面代码展示了 的情况
weights=exp_w_func(beta, time_list)
plt.plot(time_list, weights, '-ro', label="Beta:{}\
y=B^t * (1-B)".format(beta))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.title("exponentially weighted average")
plt.show()
print(np.sum(weights))结果为:
下面代码展示了不同的 取值情况
beta_list=[0.98, 0.95, 0.9, 0.8]
w_list=[exp_w_func(beta, time_list) for beta in beta_list]
for i, w in enumerate(w_list):
plt.plot(time_list, w, label="Beta:{}".format(beta_list[i]))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.show()
结果为:
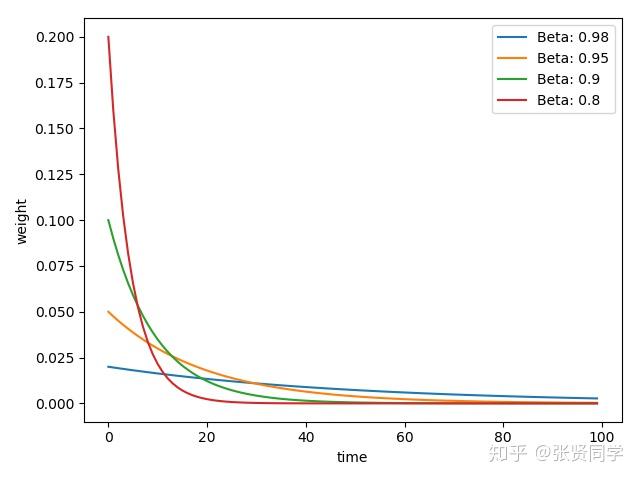
的值越大,记忆周期越长,就会更多考虑前面时刻的数值,因此越平缓。
在 PyTroch 中,momentum 的更新公式是:
其中 表示第
次更新的参数,lr 表示学习率,
表示更新量,
表示 momentum 系数,
表示
的梯度。展开表示如下:
下面的代码是构造一个损失函数 ,
的初始值为 2,记录每一次梯度下降并画图,学习率使用 0.01 和 0.03,不适用 momentum。
def func(x):
return torch.pow(2*x, 2) # y=(2x)^2=4*x^2 dy/dx=8x
iteration=100
m=0 # .9 .63
lr_list=[0.01, 0.03]
momentum_list=list()
loss_rec=[[]for l in range(len(lr_list))]
iter_rec=list()
for i, lr in enumerate(lr_list):
x=torch.tensor([2.], requires_grad=True)
momentum=0. if lr==0.03 else m
momentum_list.append(momentum)
optimizer=optim.SGD([x], lr=lr, momentum=momentum)
for iter in range(iteration):
y=func(x)
y.backward()
optimizer.step()
optimizer.zero_grad()
loss_rec[i].append(y.item())
for i, loss_r in enumerate(loss_rec):
plt.plot(range(len(loss_r)), loss_r, label="LR:{}M:{}".format(lr_list[i], momentum_list[i]))
plt.legend()
plt.xlabel('Iterations')
plt.ylabel('Loss value')
plt.show()
结果为:
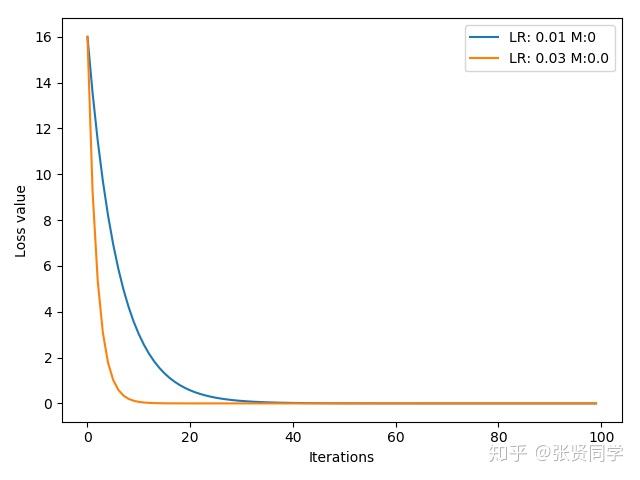
可以看到学习率为 0.3 时收敛更快。然后我们把学习率为 0.1 时,设置 momentum 为 0.9,结果如下:
虽然设置了 momentum,但是震荡收敛,这是由于 momentum 的值太大,每一次都考虑上一次的比例太多,可以把 momentum 设置为 0.63 后,结果如下:
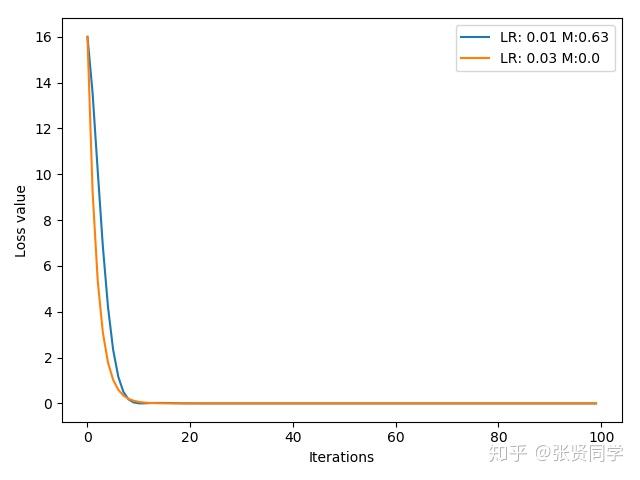
可以看到设置适当的 momentum 后,学习率 0.1 的情况下收敛更快了。
下面介绍 PyTroch 所提供的 10 种优化器。
optim.SGD(params, lr=<required parameter>, momentum=0, dampening=0, weight_decay=0, nesterov=False
随机梯度下降法
主要参数:
- params:管理的参数组
- lr:初始学习率
- momentum:动量系数
- weight_decay:L2 正则化系数
- nesterov:是否采用 NAG
自适应学习率梯度下降法
Adagrad 的改进
RMSProp 集合 Momentum,这个是目前最常用的优化器,因为它可以使用较大的初始学习率。
Adam 增加学习率上限
稀疏版的 Adam
随机平均梯度下降
弹性反向传播,这种优化器通常是在所有样本都一起训练,也就是 batchsize 为全部样本时使用。
BFGS 在内存上的改进
参考资料
如果你觉得这篇文章对你有帮助,不妨点个赞,让我有更多动力写出好文章。
 真实优惠
真实优惠 信息全面
信息全面 专业服务
专业服务 万千口碑
万千口碑 诚信经营
诚信经营 广东墓地网手机站
广东墓地网手机站 天猫官方旗舰店
天猫官方旗舰店 020-88888888
020-88888888
